Calibrate the PiCrawler¶
Due to possible deviations during PiCrawler installation or limitations of the servos themselves, some servo angles may be slightly tilted, so you can calibrate them.
Of course you can skip this chapter if you think the assembly is perfect and doesn’t require calibration.
The specific steps are as follows:
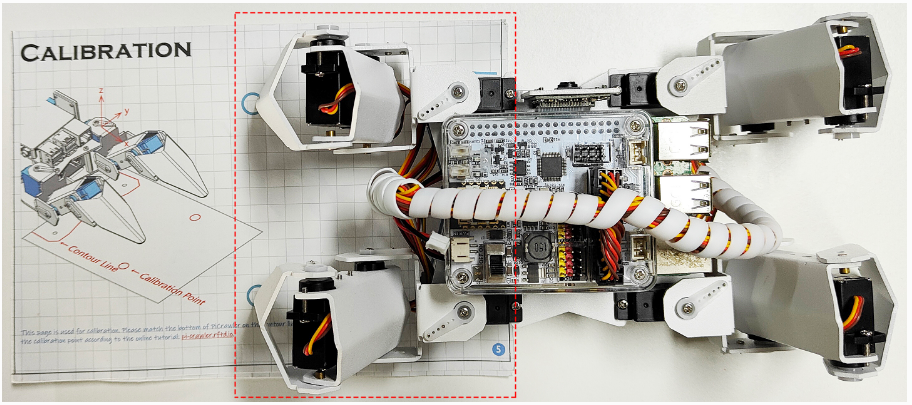
Take out the assembly leaflet, turn it to the last page, and lay it flat on the table. Then place the PiCrawler as shown below, aligning its bottom with the outline on the calibration chart.
Run the
calibration.py.cd /home/pi/picrawler/examples/calibration sudo python3 calibration.py
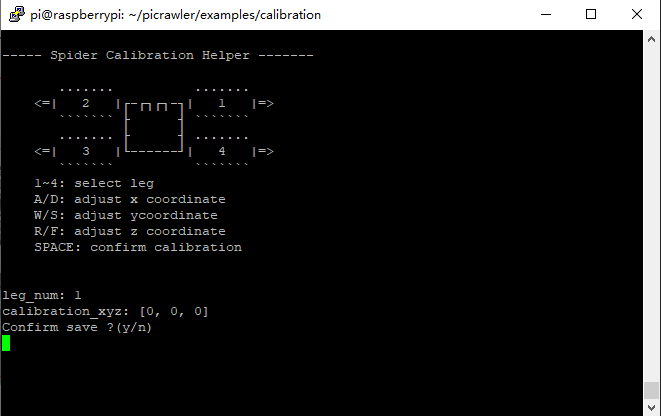
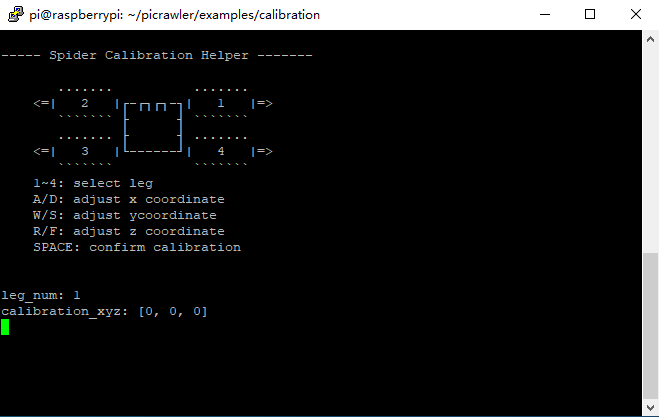
After running the above code, you will see the following interface displayed in the terminal.
Press
2and3keys respectively to choose left 2 legs,then pressw,a,s,d,r, andfkeys to move them to the calibration point.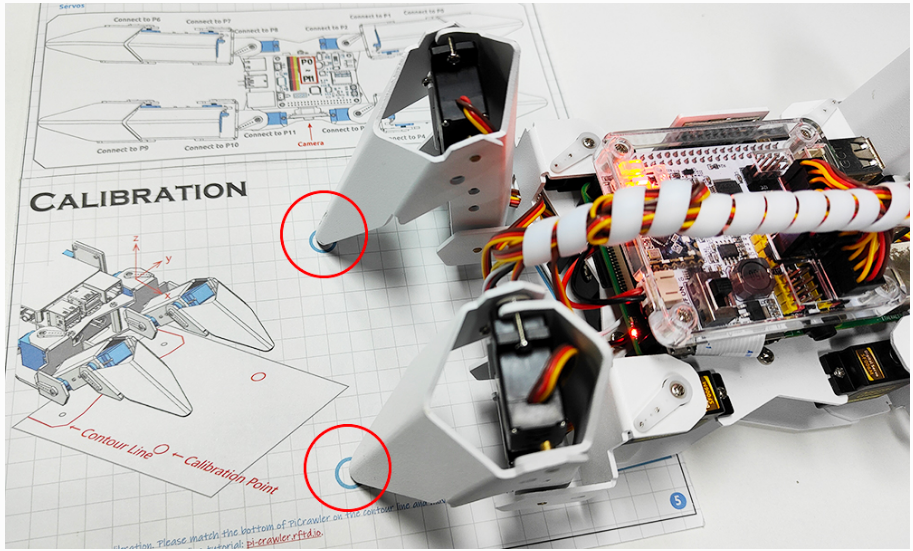
Now, change the calibration paper to the right and press the
1and4keys to choose right 2 legs, then pressw,a,s,d,r, andfkeys to move them to the calibration point.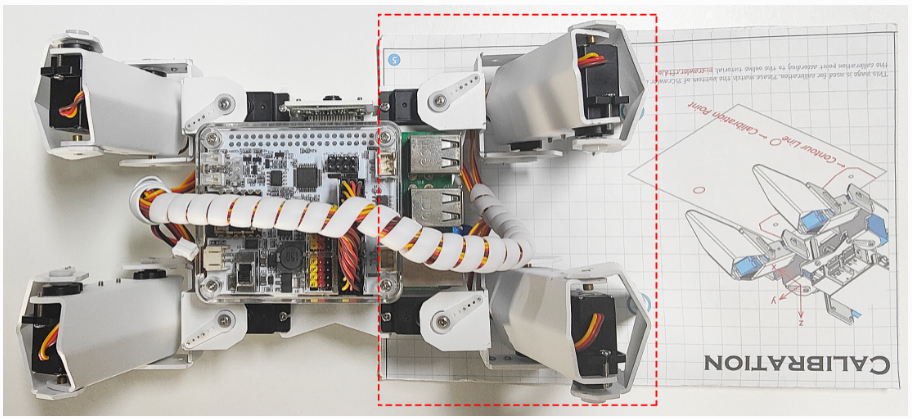
After the calibration is completed, press the
spacekey to save, you will be prompted to enterYto confirm, and thenctrl+cto exit the program to complete the calibration.